Дроны нужны не только для развлечений и съемок красивых видов, они способны на большее. Исследователи уже делают беспилотники, которые общаются друг с другом и ищут тонущих людей. Они же представляют устройства, которые доставляют товары быстрее любого курьера. Летающее беспилотное такси — тоже не фантазия ученых, а транспорт будущего. Что нам ждать и какие устройства разрабатывают в Иннополисе — в своей лекции рассказал Роман Федоренко, экс-доцент Лаборатории специальной робототехники Университета Иннополис.
Читайте «Хайтек» в
Кто такие роботы?
Несколько лет назад на Reddit появилась классная штука — ученые описывали сложные исследования одной простой фразой. Если бы меня попросили так сделать, я бы сказал, что робототехника — область, где можно увидеть, как двигается код.
Робототехника — это синергетическая прикладная сфера деятельности. Она состоит из программирования, мехатроники и кибернетики. Мехатроника — это то, что взаимодействует с реальным миром. А кибернетика — многозвенная наука, которая включает в себя, прежде всего, управление созданными программами.
Что такое робот? 15 лет назад многие бы сказали, что это робот-манипулятор, который работает на заводе и занимается сваркой или покраской. Другой популярный ответ — это робот-андроид из мира кино. Но является ли роботом подвижная тележка или беспилотный автомобиль? Да, это тоже одна из областей роботехники.
Летательные аппараты — тоже роботы, одни из самых последних разработок включают в себя интеллектуальные технологии и являются, по сути, автономными роботами.

Еще есть такая область робототехники как field robotics — «мобильная робототехника». Сюда включают всех роботов, которые двигаются в поле, здании или под водой. Самое интересное применение, на мой взгляд, — это сельское хозяйство.
История летательных аппаратов
История летательных аппаратов началась в прошлом веке. До этого летали только воздушные шары без двигателя, и их сложно было назвать роботами. В начале прошлого века функционировали два типа летательных аппаратов — дирижабли и самолеты. Первый управляемый полет совершили братья Райт. Причем первый автопилот появился довольно быстро, практически через 10 лет после этого, он помогал стабилизировать полет.
Текущее направление робототехники связано с развитием и доступностью новых открытых автопилотов, таких как PixHawk (PixHawk — открытое аппаратное обеспечение для контроллеров, дронов и других БПЛА. Его используют для академических, любительских и профессиональных целей). Пример прихода дронов в жизнь каждого человека — доставка пиццы компанией «Додо Пицца» совместно с «Коптр экспресс» — это произошло в 2014 году.

Как управляется дрон
Современные летательные аппараты используют один из трех принципов создания подъемной силы — аэростатический, реактивный или аэродинамический. Аэродинамический принцип полета и создания подъемной силы (отбрасывание вниз части воздуха) можно реализовать либо за счет движения всего аппарата, снабженного неподвижной несущей поверхностью (крыло), либо за счет движения отдельных несущих частей аппарата (несущий винт, вентилятор) относительно воздушной среды.

У дрона есть винт, который создает подъемную тягу. Оторвавшись от земли, устройство начинает двигать винтом быстрее и поднимается вверх. Но сила действия равна силе противодействия. При вращении винта создается момент в другую сторону — с этим связана конструкция вертолетов и коптера. Если у вертолета будет один винт — он не будет стабильным.
Поэтому устройство использует либо схему с двумя винтами, либо хвостовой винт.
В квадрокоптере очень простая конструкция — у него обычно четыре винта, два из которых вращаются в одну сторону, а два — в другую. Если пользователю нужно двигаться вперед, то одни винты вращаются медленнее, а другие — быстрее. А если пользователь хочет повернуть, то одни винты, размещенные по диагонали, ускоряются, а другие — замедляются.

Движения коптера по углам связаны с движением по координатам. Если пилот хочет двигаться вперед, нужно сначала наклонить дрон вперед, а затем, когда устройство на электротяге потянется вперед, стабилизировать его в той точке, где мы хотим остаться.
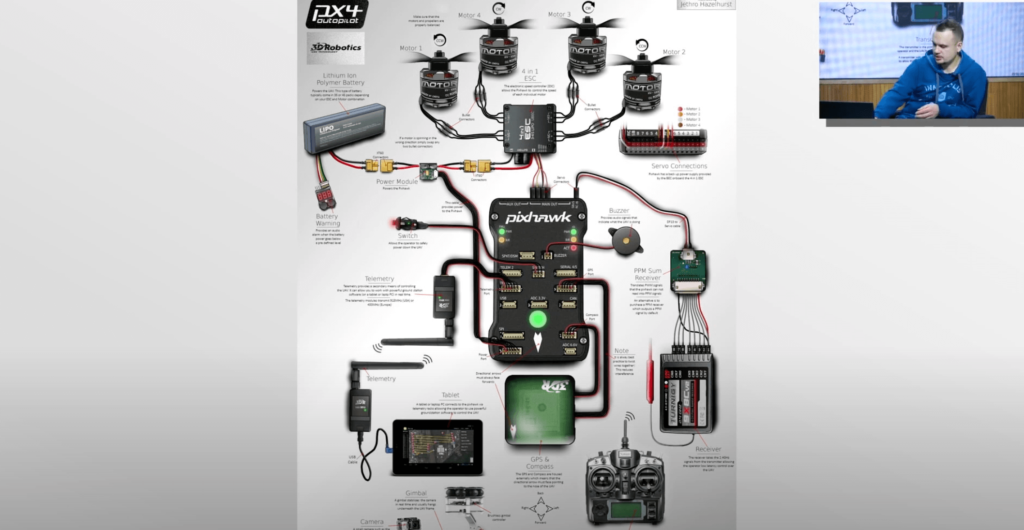
Это схема одного из самых популярных автопилотов, на базе которого можно сделать новые устройства. Он подключается ко всем моторам и датчикам. Причем у моторов есть свой блок управления, регулятор ESC — Electronic Speed Controller, управляющий оборотами мотора.
Из сенсоров здесь есть GPS, чтобы дрон мог работать вне помещений, летать по точкам и стабилизировать положение. Но внутри самого автопилота также есть IMU — модуль инерциальных датчиков, который позволяет ему определять углы ориентации. Также есть канал связи, наземный пункт управления и батарея.
Как говорилось выше, существует некий уровень управления двигателем — мы, уже не задумываясь, можем задать скорость вращения. По тому же принципу работают и остальные уровни: следующий — это управление ориентацией.
Но прежде нам нужно управлять скоростью вращения — на этом уровне летают FPV-коптеры (устройства, которые позволяют наблюдать за картинкой с камеры дрона в режиме реального времени от первого лица (FPV – First Person View). Опытные пилоты задают скорость вращения и постоянно подруливают джойстиком. Следующий этап — когда пользователь может стабилизировать угол, но при этом дрон все равно будет двигаться. Дальше — контроль скорости, а самый высокий — это позиционное управление, маневры для движения в точку или движение по заданной траектории.
Те, кто хотят программировать, собирать и управлять дронами — должны обратить внимание на opensource-автопилот PIX4. Вокруг воздушной роботехники есть целое сообщество (ROS — robotic operating system, или Open robotics), есть симуляторы для дронов. Поэтому многие эксперименты можно совершить в симуляторе, не имея самого дрона.
Стадии разработки дрона
Исследователи начинают с концептуального моделирования, а затем им нужно построить точную модель аппарата. Не углубляясь в формулу, модель коптера — это, по сути, модель твердого тела. Это второй закон Ньютона, расширенный на системы частиц. Он имеет поступательное и вращательное движение, есть кинематика и динамика движения, а чтобы описать модель конкретного аппарата, мы должны добавить сюда уравнение сил, действующих на конкретный дрон.

Следующим этапом является разработка системы управления. Если идти классическим способом: сначала мы узнаем точную математическую модель и на ее основе уже синтезируем алгоритм управления или новые формулы. В систему управления можно включать все уровни: планирование движения, восприятие среды, оценивание состояния с помощью датчиков. Алгоритмы позволяют уточнять наши координаты и данные.

Когда есть алгоритм управления, его можно сразу применять, но делать это довольно затратно. Устройства падают при малейшей ошибке — это надо учитывать и делать резервные копии. Для тестирования используются симуляторы.
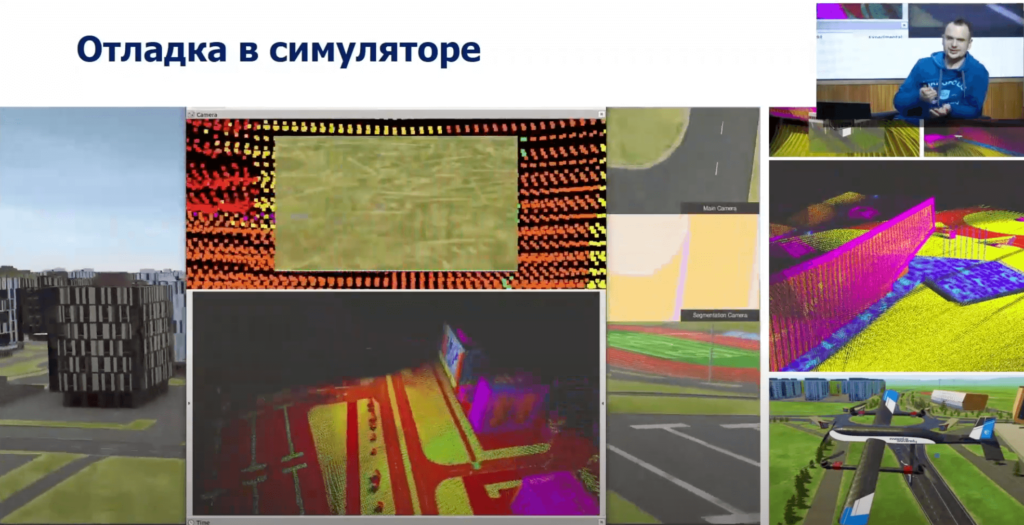
Ниже показана виртуальная экскурсия по Иннополису — продукт нашего университета, он доступен для скачивания на GitHub. Это не только визуальная составляющая, но и данные всех датчиков аппарата. У него есть все позиционные датчики, им управляют как дроном и могут отлаживать все алгоритмы управления.
Когда на основе опыта с симулятором появляется больше уверенности — можно переходить к аппаратной реализации. Здесь показаны ее составляющие: изготовление аппарата из карбона и композита, создание электроники, размещение двигателей, их крепление.
Тесты начинаются не на улице: сначала устройства тестируются на подвесе или специальном стенде. На них можно отлаживать элементы функционирования беспилотного летательного аппарата. Например, здесь показан самолет вертикального взлета и посадки — это гибрид коптера и самолета, на видео можно увидеть, как он справляется со внешними возмущениями и держит угол. Справа показан довольно безумный эксперимент, когда запускают пять двигателей одновременно и смотрят, как система управления справляется с этим.

После тестирования переходят к подлетам — небольшие взлеты на небольших скоростях, управляемое движение с пилотом, который может перехватить контроль. Финальным аккордом является полностью беспилотный полет.
Устройство взлетает вертикально — «по-коптерному», потом у него включается маршевый двигатель, беспилотник разгоняется, переходит в самолетный режим, развивает достаточную скорость, чтобы работало крыло. Затем контурные винты выключаются, и он летит по-самолетному — процесс посадки осуществляется в обратной последовательности.
Что происходит с беспилотниками
Одна из задач, над которой работают современные ученые — обход препятствий при полете. Некоторые дроны уже умеют это, но задача стоит чуть шире — надо научить устройства как можно быстрее двигаться в среде с препятствиями. И тут по-прежнему есть куда стремиться и улучшать алгоритмы.
Еще один пример такого тестирования — полет в лесу. Есть очень интересный подход — здесь применяются не только новые алгоритмы, но и сенсорика — ивенткамера. Это очень высокочастотная камера, которая передает разницу между кадрами в каждую единицу времени: это позволяет быстро осуществлять управление и реагировать на препятствия.
В области планирования движения дрона проводятся соревнования: кто быстрее это сделает. Задача состоит в том, чтобы картографировать неизвестную область, построить ее трехмерное представление, найти на ней объекты. Мы летали в университете, но тоже решали задачу поиска объектов. Наши результаты были даже лучше, чем у известных опубликованных алгоритмов.
Существуют соревнования и по гонке дронов. Они делаются на устройствах с камерой, когда у пилота есть очки и он управляет дроном, чтобы максимально быстро пролететь через ворота. Довольно зрелищное мероприятие, где ту же задачу надо выполнить и в автоматическом режиме. К сожалению, пока компьютеру удалось победить человека только в шахматы, а робот-дрон не смог обогнать человека-пилота, хотя прогресс уже довольно серьезный. Дрон с помощью алгоритма машинного зрения может выполнять такие задачи, работа идет только на увеличение скорости.
Еще одно соревнование — Microsoft Games of drones, оно проводится в симуляторе. В этой же области проводится одно из известных ведущих соревнований в Саудовской Аравии. Участники там набираются на три года вперед.
Беспилотные устройства используют для шоу дронов — это зрелищные мероприятия, которые сегодня стали заменой салютам. Но это не единственное групповое применение — они могут инспектировать большую область.
Где применяют
Чтобы это не выглядело как исключительно научные разработки, ниже — демо дрона Skydio. Сейчас это самое совершенное устройство по части автономности. Это пример того, как современные технологии — картография, обход препятствий, планирование движения используются совместно в уже доступном для пользователя продукте.
Еще одно направление — это новые конструкции летательных аппаратов. Одно из них — складные дроны. Одно такое устройство может залетать в узкие пространства для инспекции после аварии. Другой пример — дрон, который может раскладываться. Например, он умеет вылетать из узкой пневматической трубы и дальше лететь в обычном режиме.
У нас тоже есть проект в этой области — это мягкий Tensodrone. Это первый дрон мягкой конструкции, который летает. Удовольствие заключается в том, что его можно ронять и он останется целым. Кроме того, можно изменить длины балок, натяжение тросов.
Два примера, которые воплотятся в жизнь в ближайшее время. Во-первых, доставка с помощью дронов. Сейчас есть очень интересная реализация, когда мы совмещаем почтомат и посадочную станцию дрона — в этом случае не нужно заботиться о том, когда дрон прилетит, куда он сядет, чтобы мы к нему вышли вовремя, забрали груз, пока его не украли. Второй пример — летающее такси.
Это самая впечатляющая область разработок, уже есть работающие прототипы. Но это произойдет только в ближайшее десятилетие.
Какие разработки в области летающих такси появлялись за последние 6 лет:
— Компания «Ховер» представила аппарат с малошумным электродвигателем и компактными габаритами — как у автомобиля. Он взлетает на высоту 150 м и садится на стандартное парковочное место. Дрон рассчитан на двух пассажиров, максимальная грузоподъемность — 300 кг, а скорость — 200 км/ч.
— В 2016 году российская компания Hoversurf показала ховербайк, который можно носить с собой и в любой момент взлететь с обычного городского парковочного места. Он развивает скорость до 100 км/ч, а высота подъема принудительно ограничена 5 метрами в целях безопасности.
— В 2018 году разработанный Airbus пассажирский VTOL-самолет Alpha One поднялся на высоту 5 метров и продержался в воздухе 53 секунды. Пользователь сможет вызвать БПЛА через приложение и добраться из одной точки в другую как в черте города, так и за его пределами.
— В 2020 году аэротакси CityAirbus совершило первый свободный полет. Тестирование состоялось в пригороде Парижа, городе Иль-де-Франс.Летательный аппарат CityAirbus способен передвигаться со скоростью до 120 км/час на расстояние до 30 км. Вес летающего такси — более 2,2 т, CityAirbus оборудован тремя пассажирскими местами и одним водительским.
— В 2022 году китайский стартап Pantuo Aviation представил T1 — это демонстратор летающего такси с воздуховодом. Он будет летать со скоростью более 300 км/ч, а дальность полета составит 250 км.
Читать далее:
Источник: hightech.fm
От стартапа до лоббиста: как Hive и Иннополис создают будущее беспилотной авиации

Привет, Хабр! Меня зовут Николай Ряшин, я генеральный директор компании Hive. Мы создаем, тестируем и устанавливаем дронопорты — автоматизированные станции для обслуживания беспилотников.
Сегодня я хочу рассказать, зачем дроны бороздят просторы Иннополиса, почему в России до сих пор нет беспилотной авиадоставки, и какие шаги мы делаем, чтобы это изменить.
Как любитель, я познакомился с беспилотниками в 2016 году, причем это были FPV-дроны. Я собрал команду, участвовал в соревнованиях. Интерес к дрон-рейсингу стал затравкой для бизнес-идей. Через некоторое время наша команда стала сервисным подрядчиком правительства Москвы. Нас было 15 человек, мы носились по всему городу, делали по 40–50 вылетов в день и на своей шкуре почувствовали проблемы отрасли.

Современные промышленные дроны умеют летать по заранее заданной программе, и ими не обязательно управлять вручную. Полетная миссия определяется заранее, задаются точки, действия на них, и все выполняет автопилот. Однако, человек все равно нужен для технического обслуживания и безопасности. Он готовит дрон к вылету, меняет аккумуляторы между миссиями, подстраховывает автоматику в нештатных ситуациях. И с участием людей в полетах связано много сложностей.
Чтобы запускать дроны, нам приходилось стоять по колено в грязи на стройках, объясняться с полицейскими и убегать по промзонам от собак. А еще каждый оператор может банально проспать, застрять в пробке или заболеть. Так что мы начали прорабатывать концепт автоматизированной станции, которая избавила бы нас от необходимости работать в поле, и в 2020 году запустили первый дронопорт.
Дронопорт крупным планом
Проект состоит из двух частей. Первая — это, собственно, дронопорт, то есть станция для хранения, запуска и обслуживания промышленных дронов.
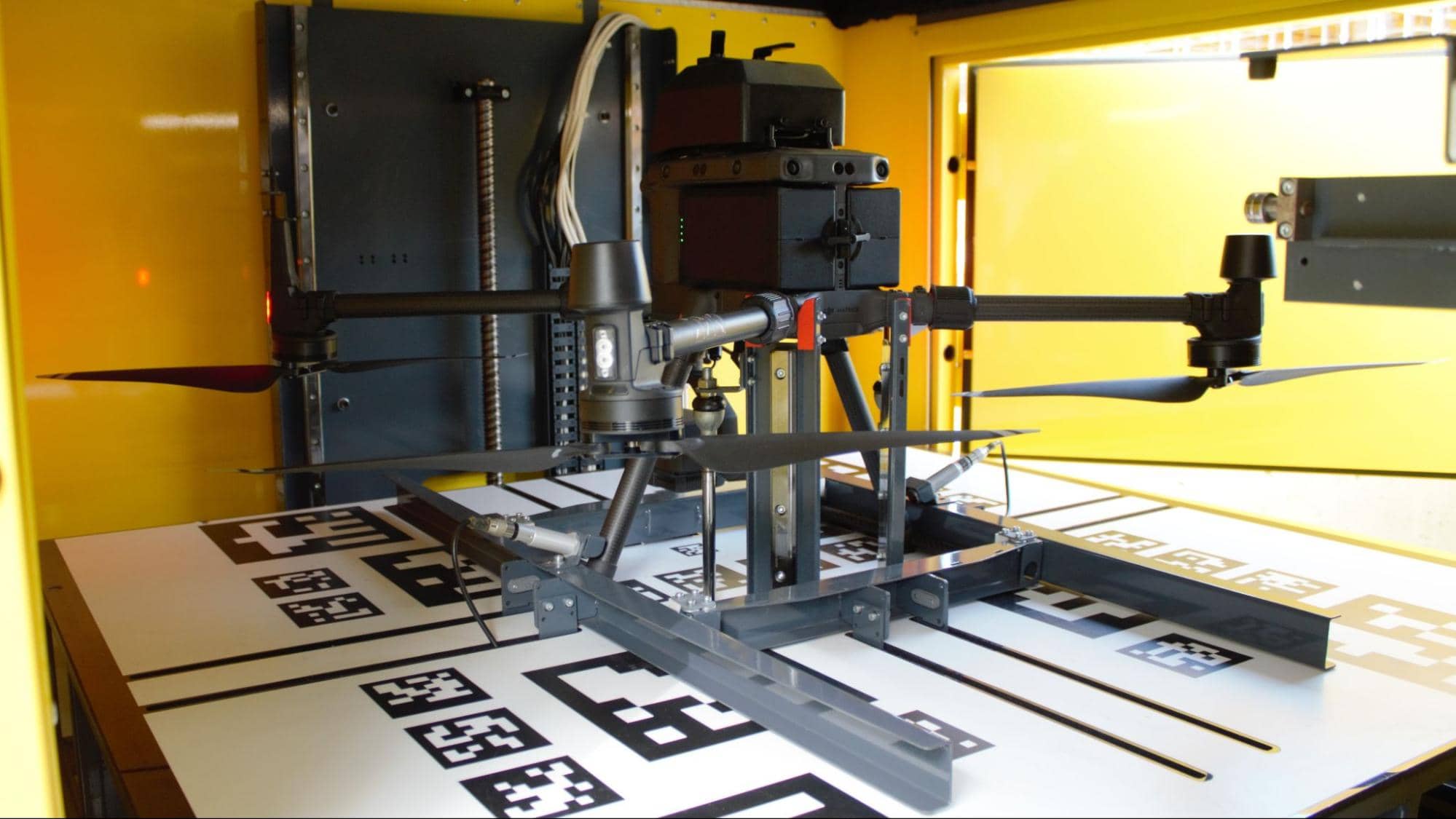
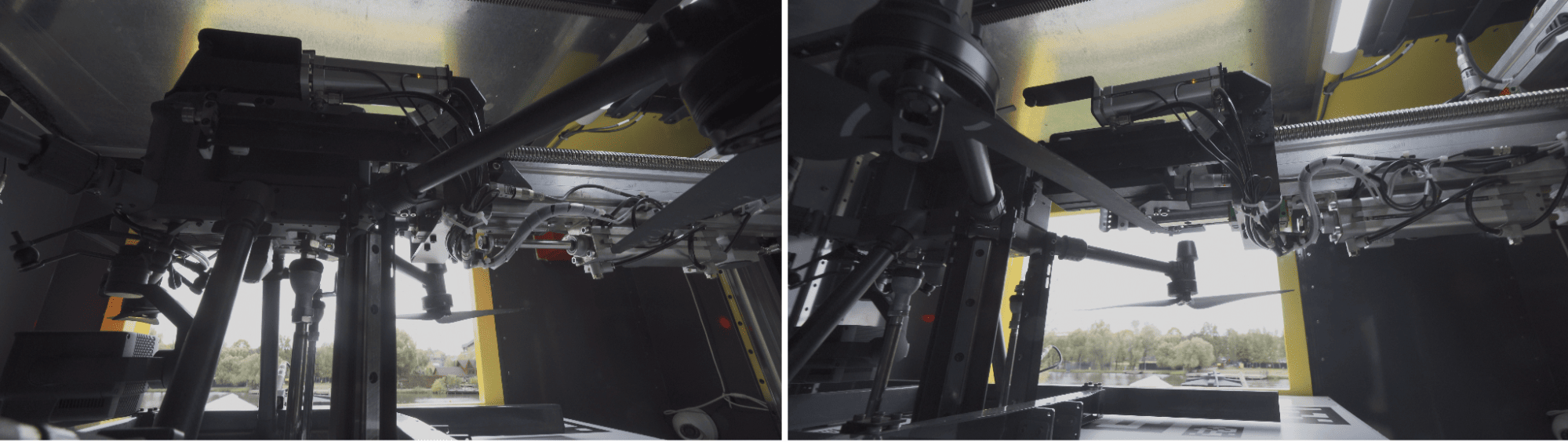
Эта желтая коробка прячет в себе посадочную площадку, где дрон хранится в сухости и тепле, и робот-манипулятор, который меняет аккумуляторы коптера. Полутораминутный питстоп, и беспилотник снова готов к полету.
Посадка и обслуживание происходят под прицелом камер, а встроенная в дронопорт связь позволяет удаленно обновлять полетные задания и загружать записанные беспилотником данные. Эксплуатировать дроны таким образом можно в режиме 24 на 7 почти без участия человека.

Диспетчер сидит в комфортном офисе и следит за работой сразу десятка дронопортов с помощью второго компонента системы — облачной платформы для удаленного управления, мониторинга беспилотников и обработки собранных данных. Если, например, в Турции дрон теряет связь со спутниками, то диспетчер из Москвы может перехватить управление и вернуть его на базу.
Стратегический просчет и хитрые китайцы
На старте разработки мы хотели сделать еще и собственный дрон, но вскоре поняли, что собрать посадочную площадку проще, чем наладить серийное производство беспилотников.
Дрон по сложности сборки похож на смартфон или ноутбук. Это компактный девайс, в который нужно упаковать кучу электроники, да так, чтобы она надежно работала. Например, при неудачном расположении компонентов, помехи от батареи портят прием GPS. Или вот, другой случай: для одного из проектов в ОАЭ мы хотели использовать 5G, но просто не нашли в продаже достаточно компактных модемов.

Так что создание собственного дрона требует больших инвестиций в разработку и очень много времени на тестирование. Поэтому, вначале мы взяли один из лучших беспилотников на рынке — DJI Matrice 300 — и интегрировали его в нашу посадочную станцию. Получилось удобно — такой коптер можно без особых проблем ввезти практически в любую страну или даже купить на месте и оснастить дронопорт.
Тем не менее, кажется, что это решение все-таки было не самым удачным. Во-первых, мы ненароком подали идею DJI, и сейчас они пытаются выпустить систему, похожую на дронопорт. А во-вторых, китайцы не пускают нас за некоторые пороги SDK, так что у Matrice 300 масса программных ограничений. Иногда приходилось изобретать такие костыли, что волосы встают дыбом, так что нам пришлось вернуться к идее дроностроительства. Впрочем, теперь мы готовы к этому лучше, чем три года назад.
Беспилотники, как инфраструктура
Дронопорт задумывался, как система автоматизации, но после всех испытаний мы поняли, что скорее делаем инфраструктурный проект.
Например, с октября 2021 по август 2022 года наша система работала на Департамент информационных технологий правительства Москвы. Фактически мы предоставляли летающие камеры с дистанционным управлением и охватом площади до 300 кв. км. Другие городские службы (префектура, госинспекция по недвижимости, департамент строительства, поисково-спасательные службы и МЧС) пользовались нашими услугами. Когда подсчитали, оказалось, что вылет дрона из дронопорта в пять раза ниже рыночной цены обычного полета.

В Дубае с помощью наших посадочных станций организовали детекцию дорожного трафика. Мы залили нейросетевые алгоритмы на бортовые компьютеры дронов, чтобы они распознавали и подсчитывали автомобили. В другой арабской стране дронопорты отвечают за непрерывный мониторинг границы в пустыне, где почти нет связи. Только там нейронки настроены на детекцию повреждений забора, а дроны просто посылают оператору по радиоканалу сжатые фотки и координаты мест, где найдены повреждения.
В ЮАР мы ведем проект по мониторингу ежедневной выработки угля. Заказчик производит добычу угля открытым способом, в карьере постоянно меняется ландшафт. Там наши дроны отвечают за создание и обновление цифровой модели рельефа, измерение объема выработки. Фактически, это замещение классических геодезических методов контроля за те же деньги, но только в супер сжатые сроки и без участия человека.
В сельском хозяйстве мы можем проводить постоянный мониторинг посевов и делать точные измерения, чтобы агрономы понимали, где растет лучше, а где хуже. Дроны хорошо подходят для мониторинга энергетической инфраструктуры, ГЭС, электросетей.
У нас есть зрелая, рабочая технология, но ее внедрение — отдельная задача, и вот вам недавний яркий пример — наша новая разработка.
Дрономат и главная проблема беспилотной авиации
Многие компании пытаются запустить доставку при помощи дронов, но их наземная структура подразумевает участие человека, и это связано со сложностями, да и не всегда безопасно. Мы хотим автоматизировать и этот процесс.

Этим летом мы выкупили часть бизнеса производителя дронов COEX — всю линейку промышленных беспилотников и права на системы для воздушной доставки. Мы переработали их конструкторские решения, провели испытания и представили дрономат для экспресс-доставки посылок. По сути, это тот же дронопорт, но с окошком для приема товара. В него кладется посылка, робот подготавливает ее к транспортировке, крепит к дрону, и тот переносит груз в другой дрономат. Там посылку можно получить, как в обычном вендинговом автомате.
Пока речь о небольших грузах, до двух килограммов. Дрон может доставить их на расстояние до семи километров, но мы рассчитываем, что после тюнинга наши беспилотники будут поднимать до 5 кг. и летать с ними на 20 километров.
Основная трудность здесь не в технологиях. Проблема в том, что крупные города, где люди готовы платить за технологичный сервис и быструю доставку, жестко зарегулированы по полетам.
Например, запускать дроны в Москве де-факто запрещено. Чтобы получить разрешение, нужно пройти семь кругов ада. Если собирать документы с нуля, на это уходит до двух месяцев. В процесс вовлечены: Департамент региональной безопасности Москвы, МВД, МЧС, префектура, мэрия. А если говорить об области, которая находится вне диспетчерской зоны аэропортов и вертолетных площадок, то можно летать без разрешения до высоты 150 метров и только в зоне прямой видимости пилота.
Опасения регулятора понятны: а вдруг множество беспилотников в воздушном пространстве приведет к авариям, пострадают люди, инфраструктура, но у нас даже нет шанса доказать, что всего этого можно избежать. Точнее, не было до недавнего времени.
Анклав будущего, или как организован запуск дронов в Иннополисе
Мы собрали за одним столом представителей Росавиации, Минэкономразвития, профильных сообществ и экспертов, объясняли свои цели и планы. В итоге, при помощи администрации Иннополиса, инициировали экспериментальный правовой режим, и теперь у нас будет два-три года, чтобы доказать, что дроны в городе — это безопасно и эффективно.
Идея в том, чтобы апробировать UTM-систему, так называемую систему управления движением беспилотных летательных аппаратов. Это цифровая платформа, которая позволяет отправлять и оперативно согласовывать план полета с государственными органами и автоматизировано получать разрешения на полеты. Уже сейчас, чтобы согласовать полет по Иннополису, достаточно нажать одну кнопку.
Система хранит информацию о маршрутах, нахождении, задачах каждого беспилотника, а в перспективе UTM позволит контролировать местоположение каждого беспилотника в режиме реального времени, разводить полетные коридоры и связываться с пилотами. Получится диспетчерский центр для БПЛА.
Создание регуляторной песочницы даже важнее, чем разработка и тестирование новых дронов. По моим прикидкам, если суммировать потребности рынка, 15–20% услуг могут быть оказаны дронами без участия человека. В одной только России на этом рынке по грубым оценкам зарыто несколько миллиардов рублей, но из-за особенностей законодательства, он развивается очень медленно.
Получается замкнутый круг, ведь для отладки беспилотников необходимо их массово выпускать и тестировать в реальных условиях. Культура пилотных проектов в стране еще не сформировалась, и если услуги дронов сильно ограничены, то и спрос на них невысокий. Соответственно, у производителя нет денег на отладку продукта.
В таких условиях только очень большие компании могут продвинуться за счет инвестиций, а такие стартапы, как мы, испытывают большие сложности. Они вынуждены уходить в другие, менее зарегулированные страны, например, на Ближний Восток. Без инициативы со стороны бизнеса ситуация не изменится. Поэтому мы вкладываем много усилий в общение с регулятором, — это важно не только для нас как компании, но и для всей российской индустрии беспилотников.
Планов на будущее много. Мы налаживаем стратегическое партнерство с белорусскими производителями полноразмерных вертолетов, есть намерение интегрироваться с Вертолетами России. Если законодательство станет совершеннее, выиграют все, а мы однажды исполним давнюю мечту и запустим автоматизированную площадку для обслуживания беспилотников, способных поднять десяток тонн.
- иннополис
- беспилотники
- дрономат
- беспилотная доставка
- разработка электроники
- квадрокоптеры
- будущее здесь
- законодательство
- регулирование полетов
- экспериментальный правовой режим
- Блог компании Город Иннополис
- Производство и разработка электроники
- Мультикоптеры
Источник: habr.com
Предприятие по производству беспилотных летательных аппаратов сельскохозяйственного назначения

Наименование проекта: Создание предприятия по производству комплексов беспилотных летательных аппаратов (БПЛА) сельскохозяйственного назначения.
Производство БПЛА сельскохозйственного назначения направлено на решение задач обеспечения высокой эффективности авиационной агрохимобработки.
В результате реализации данного проекта новое предприятие имеет реальную возможность стать первым Украинским предприятием по изготовлению высокоэффективного, высококачественного и инновационного комплекса для химической и биологической обработки полей. Основным видом деятельности предприятия является деятельность по производству БЛА и их сервисному обслуживанию.
На первых этапах производства предприятие обеспечивает рабочие мета 10 рабочим, с заработной платой не менее 3000 грн.
Для производства БПЛА предприятие закупает современное оборудование и высококачественный материал.
Основные конкуренты предприятия: рынок не развит, прямые конкуренты на территории Украины отсутствуют.
Финансовые ресурсы, необходимые для реализации проекта —
акционерный капитал в размере 757043 грн.
Срок окупаемости: 2 года
Определение целей предприятия
Главными задачами данного бизнес-плана является:
- Обоснование рентабельности ввода в строй и эксплуатации цеха по производству БПЛА сельскохозяйственного назначения на действующих арендуемых производственных площадях и реализации готовой продукции на национальном рынке;
- Выявление условий рынка и прогноз продаж готовой продукции, определение мощности производства в инвестиционный период;
- Оценка ожидаемых финансовых результатов бизнеса и построение финансовой стратегии.
Главная стратегическая цель: создание предприятия по производству БПЛА сельскохозяйственного назначения, ориентированного на дальнейший рост и развитие, продукция которого будет пользоваться большим спросом среди крупных сельскохозяйственных предприятий в пределах Украины, в силу высокого качества и экономической эффективности. После закрепления позиций на национальном рынке, планируется наращивание мощностей и выход на рынок России и стран СНГ.
Анализ состояния дел в отрасли
Особенностью современного состояния авиационной агрохимической обработки полей и других сельскохозяйственных угодий является отсутствие сельскохозяйственной авиации, доступной для широкого применения. Для того чтобы в полной мере оценить необходимость применения авиационной агрохимической обработки полей, проведем анализ состояния сельскохозяйственных угодий Украины, наряду с современными методами
34 стр., 16976 слов
Курсовая проект производства работ
. в строительстве. Часть 2. Строительное производство». Проект производства работ является единственным организационно — технологическим документом производственного назначения, который для конкретного здания, сооружения . “Организация строительного производства”. Срок строительства согласно СНиП 1.04.03-85 “Нормы продолжительности строительства и задела в строительстве предприятий зданий и .
Структура рынка растениеводства Украины
Украина имеет значительные возможности для развития аграрного сектора. Этому способствуют благоприятные климатические условия, наличие плодородной почвы (более четверти мировых запасов черноземов расположены на территории Украины, при этом, они занимают порядка 44,0% ее территории, тогда как в мире на их долю приходится лишь около 6% территории), высокие урожаи, которые позволяют не только обеспечивать внутренние потребности страны, но также формируют мощный экспортный потенциал.
Площадь сельскохозяйственных угодий, используемых аграрными предприятиями и гражданами на 1 января 2011 года составила 36,5 млн.га (61% территории Украины), из них 30,9 млн.га -площади пашни. В Украине площадь пахотных земель составляет 61% территории.
Таблица 1 Структура растениеводства в Украине 2010г.
Картофель и овощебахчевые культуры
Плоды, ягоды, виноград
В 2010 году в Украине действовало 56 тыс. аграрных предприятий, из них 15,8% предприятий имеют площадь до 100га, 17,3% -от 100 до 500 га, 11,2% -от 500 до1000га, 14,1% — от 1000 до 2000 га,18,8% — более 2000 га.

Относительно перспектив и тенденций растениеводства можно сделать вывод, что Украина сохранит позиции мирового с/х производителя. По прогнозам планируется расширение посевных площадей в Украине и рост цен на продукцию. Прогнозируется рост экспорта масленичных и технических культур из Украины в ЕС, что связано с развитием биотопливной отрасли. До 2020 года рост производства биодизеля прогнозируется на уровне 22%.
Экспорт кукурузы из стран СНГ, в основном из Украины, увеличится более чем на 80% до 11 млн.т (в 2010г. Украина экспортировала 5млн.т).
При благоприятных погодных условиях после спада 2010 года Украина займет позицию мирового лидера по экспорту ячменя, рост экспорта сои составит 32%, также прогнозируется увеличение экспорта пшеницы.
Анализ рынка средств и способов защиты растений
Для достижения высоких показателей, растениеводство необходимо рассматривать неразрывно с внедрением современным научно-технических инноваций относительно обработки полей. Современное возделывание сельскохозяйственных культур требует постоянной борьбы с болезнями, сорняками и вредителями культурных растений. Агрохимия на современном этапе развития позволяет значительно увеличить урожайность сельскохозяйственных культур и снизить их заболеваемость. Современные методы защиты растений представлены в табл. 2
Таблица 2 Методы защиты растений
Методы защиты растений
Краткое описание метода
использование общих и специальных приёмов агротехники, с помощью которых создают экологические условия, неблагоприятные для развития и размножения вредных организмов и повышающие самозащитные свойства растений
использование хищных и паразитических насекомых (энтомофагов), хищных клещей (акарифагов), микроорганизмов, нематод, птиц, млекопитающих и др. для подавления или снижения численности вредных организмов
применение веществ, токсичных для вредных организмов
использование заградительных и ловчих канавок, ловчих поясов, различных приспособлений для вылова вредителей и т.д.
использование физических агентов — радиоактивных и тепловых излучений, ультразвука, света и др.
На сегодняшний день тенденции развития рынка обработки полей показывает что, одной из наиболее развивающихся на современном этапе является биологическая и химическая защита растений.
Химический метод защиты растений основан на применении химических препаратов (пестицидов), вызывающих гибель насекомых, растительноядных клещей и других вредителей, а также возбудителей грибных, бактериальных и иных заболеваний. Химические средства борьбы применяют различными способами: опрыскивания, опыливания, аэрозолей, путем внесения в почву, в виде отравленных приманок. Существенный недостаток этого способа — большая потеря препарата в процессе работы. Также необходимо отметить, что широко развернувшаяся во второй половине 20-го столетия борьба с вредными организмами, путем использования синтетических пестицидов, привела к насыщению биосферы веществами, токсичными для человека, сельскохозяйственных животных, полезной фауны и флоры.
В районах регулярного применения ядохимикатов все активнее развиваются устойчивые к химическим пестицидам популяции вредных насекомых и возбудителей заболеваний, а также наблюдается массовое размножение видов, раннее не представлявших опасности. В связи с непрерывным ростом стоимости научных исследований и производства пестицидов, а также необходимостью увеличения норм и кратности их применения для преодоления устойчивости вредных организмов к ядохимикатам, эффективность защиты растений непрерывно снижается. В виду этого целесообразно совмещать химическую обработку с биологической. Биологический метод защиты растений в широком смысле — использование живых организмов, продуктов их жизнедеятельности или их синтетических аналогов для уменьшения плотности популяции организмов, вредящих растениям, с целью снижения их вредоносности.
Наибольший эффект защитные мероприятия дают при проведении их в максимально сжатые сроки — в течение трех, максимум пяти дней, что не всегда можно обеспечить наземными способами внесения средств защиты растений.
Во многих случаях для решения вышеперечисленных проблемы может использоваться малая авиация. При очевидной дороговизне ее услуг в сравнении с наземными способами обработки авиаобработка имеет ряд преимуществ. Первое из них — сверхлегкие летательные аппараты работают в 10-12 раз производительнее (реально достигаемая дневная производительность самолета при химобработке сельхозкультур — 500-1000 га).
Благодаря высокой производительности малая авиация позволяет в сжатые агротехнические сроки контролировать численность вредителей, предотвращать появление болезней, бороться с сорняками. Малая авиация повышает качество урожая с помощью поздних подкормок, не повреждая растения. Она эффективна на десикации высокостебельных растений, например подсолнечника. Летательные аппараты делают свою работу даже тогда, когда наземная техника не может выйти в поле из-за высокой влажности почвы.
В результате сельхозпредприятия благодаря авиахимработам могут добиться повышения урожайности на 15-35% и более, одновременно улучшив качество продукции растениеводства.
Суть предложенного проекта
В результате анализа сельскохозяйственной отрасли Украины, можно сделать вывод о том что с точки зрения эффективности химической и биологической обработки полей более целесообразным является применение малой авиации, оснащенной соответствующим оборудованием. Однако, сегодня применение указанной техники происходит стихийно и сопровождается высокой аварийностью из-за роста интенсивности труда летного состава, сложных условий работы и высокой психоэмоциональной и физической нагрузки на работающих. Для решения задачи обеспечения высокой эффективности авиационной агрохимобработки при снижении аварийности и увеличения интенсивности применения авиационных средств предлагается разработка комплекса сельскохозяйственного назначения, который направлен на автоматизацию химической и биологической обработки полей, а также позволяет за короткий промежуток времени оценить состояние полей.
В состав комплекса с беспилотным летательным аппаратом (БПЛА) сельскохозяйственного назначения входит 3 БПЛП «Стриж», предназначенных для химической обработки полей и анализа состояния полей с помощью видеонаблюдения.
Таблица 3. Основные технико-экономические показатели комплекса
Источник: inzhpro.ru